Image-Guided Interventions Tutorial using the Image-Guided Surgery Toolkit
Özgür Güler, Ziv Yaniv
(last updated December 15 2018)
Image-Guided Interventions Tutorial using the Image-Guided Surgery ToolkitÖzgür Güler, Ziv Yaniv(last updated December 15 2018) |
|
|
"One must learn by doing the thing; for though you think you know it, you have no certainty, until you try."
Sophocles
If you use these programs in your work, please cite our paper:
"Image-Guided Navigation: A Cost Effective Practical Introduction using the Image-Guided Surgery Toolkit (IGSTK)", Ö. Güler, Z. Yaniv,
Proceedings of the 34th Annual International Conference of the IEEE EMBS, 2012.
Send compliments, complaints, and bug reports to
zivyaniv@nih.gov
Always in a hurry, no time to read the manual. Go ahead and download the tutorial and give it a try. Your starting point is with the Presentations/basics.pptx. Course instructors should also look at Presentations/advanced.pptx. The installation includes presentations, all of the tutorial programs, and one sample data set.
Perhaps later on you will come back to this page and actually read it.
Image guided navigation systems rely upon a large number of technologies. When developing or using these systems one must be aware of the limitations and assumptions of the technologies. Currently, experimentation with navigation systems is limited to select clinical sites and educational institutions. This is primarily due to the high cost of such systems. As a consequence, both medical and engineering students have traditionally been exposed to the technologies through theoretical presentations.
The notion that students are more engaged and have improved learning outcomes when learning involves active experimentation has been known for centuries (see Sophocles' quote above). More recently this educational approach was formalized by the educational theorist John Dewey, describing a theory linking between experience and education, experiential education.
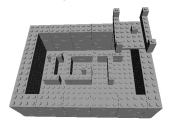
We provide an infrastructure that facilitates experiential education in the domain of Image-Guided Interventions at a minimal cost. All we require are LEGO blocks to construct a phantom, mock patient, for which we provide CT scans, and a webcam which when combined with our software provides the functionality of a basic navigation system.
For a more detailed introduction and motivation see the following:The abstract, and most accessible, version of this tutorial uses a LEGO phantom as the mock patient and a pencil as a pointer tool. For most technical people, engineers and computer scientists, this abstraction is natural. Based on our experience, this setup is too abstract for many clinicians. We therefor provide instructions for constructing and using a dedicated pointer tool and scans of anatomical phantoms that can be used instead of our LEGO phantom.
Replacing the pencil with a dedicated pointer tool is a bit more complicated than going out and buying an anatomical phantom, but if you have a 3D printer you can create the pointer tool shown below:
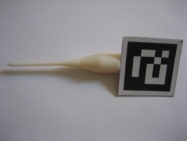
Tool design and stl file are courtesy of Emmanuel Wilson.
If you want to display a virtual representation of the pointer tool during navigation you will have to walk the extra mile. This requires some technical knowledge.
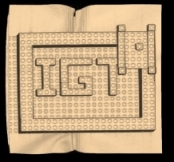
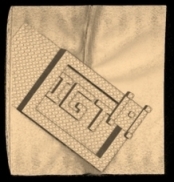
Data sets for various phantoms that can be used in the tutorial (to download, click on the image).
These data sets are provided in part through the generous financial support of the following individuals:
|
|
|
CT scan of LEGO phantom. This is the scan which is already part of the downloads above. |
|
CT scan with LEGO phantom at an angle to scanning direction. |

|
CT scan of LEGO phantom filled with rice. |
|
Mesh models of the phantom in ITK, VTK, and STL formats. |

|
Multi-modality abdominal phantom data [model 057A]. |
The following data sets are based on models manufactured by SOMSO Modelle GmbH (Coburg, Germany). Each data set includes the following components:
|
Plastic skull data [model QS 8/2M]. |
|
Plastic skull data [model QS 7]. |
|
Plastic scapula data [upper extremity model QS14]. |
|
Plastic humerus data [upper extremity model QS14]. |
|
Plastic vertebra data [vertebral column with pelvis model QS21/1]. |

|
Plastic pelvis data [vertebral column with pelvis model QS21/1]. |